|
XWOS API
4.0
XWOS C/C++ API参考手册
|
|
XWOS API
4.0
XWOS C/C++ API参考手册
|
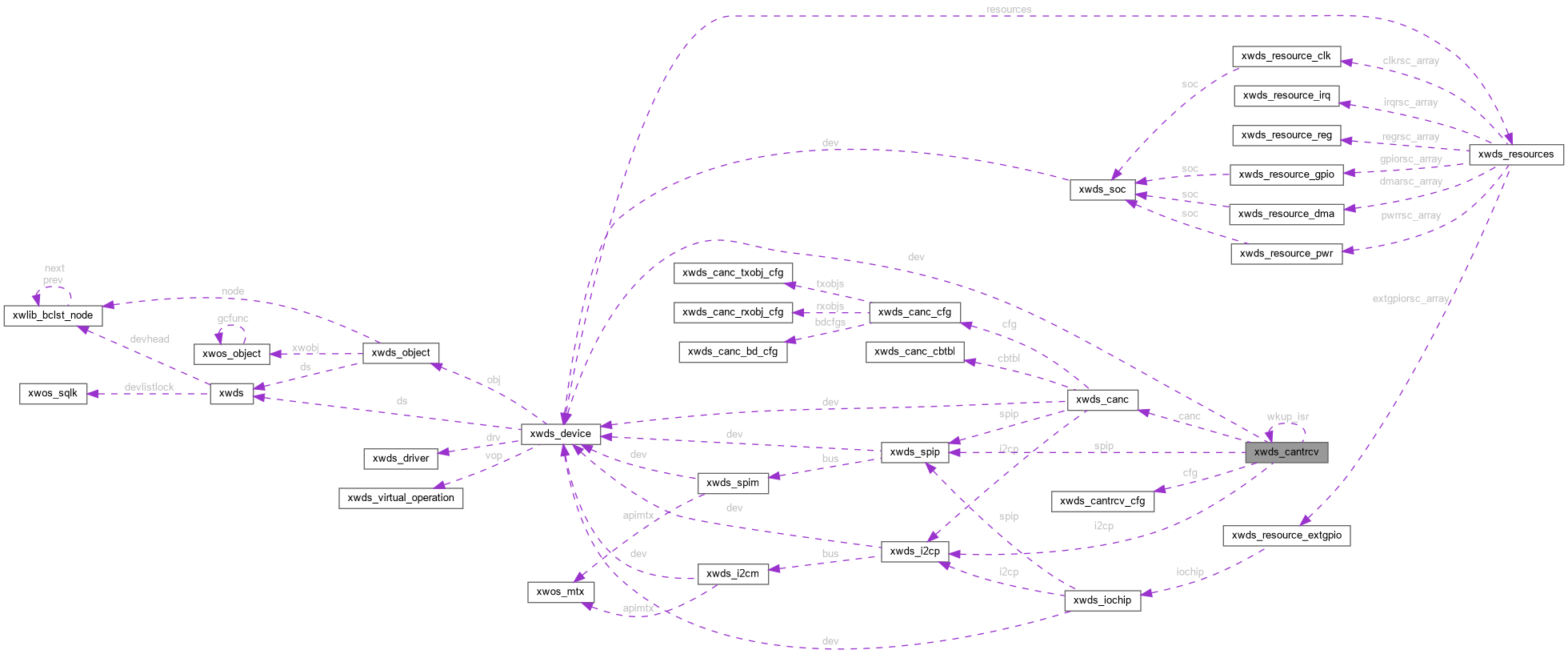
CAN接收器 更多...
#include <transceiver.h>
成员变量 | ||
| union { | ||
| struct xwds_device dev | ||
| struct xwds_i2cp i2cp | ||
| struct xwds_spip spip | ||
| } | bc | |
| struct xwds_canc * | canc | |
| const struct xwds_cantrcv_cfg * | cfg | |
| xwds_cantrcv_wkup_isr_f | wkup_isr | |
| xwsq_t | opmode | |
| xwsq_t | wkuprs | |
CAN接收器
在文件 transceiver.h 第 106 行定义.
| struct xwds_device xwds_cantrcv::dev |
继承struct xwds_device
在文件 transceiver.h 第 108 行定义.
| struct xwds_i2cp xwds_cantrcv::i2cp |
继承struct xwds_i2cp
在文件 transceiver.h 第 110 行定义.
| struct xwds_spip xwds_cantrcv::spip |
继承struct xwds_spip
在文件 transceiver.h 第 113 行定义.
| union { ... } xwds_cantrcv::bc |
基类(base class)
| struct xwds_canc* xwds_cantrcv::canc |
连接的CAN控制器
在文件 transceiver.h 第 118 行定义.
| const struct xwds_cantrcv_cfg* xwds_cantrcv::cfg |
CAN接收器的配置
在文件 transceiver.h 第 119 行定义.
| xwds_cantrcv_wkup_isr_f xwds_cantrcv::wkup_isr |
唤醒中断回调函数
在文件 transceiver.h 第 120 行定义.
| xwsq_t xwds_cantrcv::opmode |
CAN接收器模式
在文件 transceiver.h 第 123 行定义.
| xwsq_t xwds_cantrcv::wkuprs |
CAN接收器唤醒原因
在文件 transceiver.h 第 124 行定义.